Sampah organik adalah sampah yang dapat diuraikan sedangkan sampah an-organik adalah sampah yang tidak dapat diuraikan. Pada sampah anorganik terbagi dalam 2 kategori yaitu sampah logam dan sampah non logam sampah merupakan salah satu permasalahan dari sekian banyak masalah sosial yang dihadapi masyarakat kota maupun daerah. Biasanya petugas kebersihan di daerah perkotaan akan mengumpulkan semua sampah yang ada di tempat sampah daerah perkotaan lalu membuangnya ke TPA(tempat pembuangan sampah akhir). Selama ini tempat sampah di daerah perkotaan masih konvensional karena menempatkan satu wadah tempat sampah dan sampah itu tercampur sampah yang tergolong logam contohnya kaleng bekas makanan dan kaleng minuman, serta sampah yang tergolong nonlogam, contohnya kertas, botol plastik dan karet. Selama ini membuang sampah tidak sesuai golongan sampah sehingga pembuang sampah hanya pada satu tempat sehingga menyebabkan belum tersortasi dan masih bercampur.
Saat ini pembuatan dan sortasi sampah menggunakan teknologi teknologi IOT (internet of things) dimana pada tempat sampah tersebut terpasang sebuah alat yang akan bisa memberikan suatu informasi tempat apabila sampah tersebut penuh atau terdeteksi sampah berbahaya. Dengan menggunakan arudino mega sebagai mikrokontroler menggunakan sensor porximity kapasitif dan proximity induktif untuk mendeteksi sampah logam dan non logam, motor servo digunakan untuk menggerakan selector pemilah sampah. Sensor ultrasonic digunakan untuk mendeteksi level ketinggian sampah pada tempat dengan jenis Sensor mq-135 digunakan untuk mendeteksi gas yang berbahaya, sensor ph untuk mendeteksi cairan berbahaya, sim900 digunakan untuk mengirimkan informasi berupa sms dan GPS terkait lokasi dari penuhnya tempat sampah tersebut untuk proses komunikasi menggunakan Modul wemos d1 mini digunakan untuk sistem komunikasi data dan mengirim informasi ke server.

Gambar 2.3 Kerangka Tempat sampah Pintar sortasi sampah Logam & Non Logam
Cara kerja dari sistem ini adalah saat sensor ultrasonic yang dipasang pada bagian depan tempat sampah mendeteksi adanya objek maka penutup tempat sampah akan terbuka secara ototmatis. Setelah itu, sampah akan dideteksi oleh sensor proximity induktif dan kapasitif serta yang akan dipisahkan sesuai dengan inputan dari kedua sensor tersebut. Sensor ultrasonic yang mendeteksi level ketinggian sampah tersebut apabila level ketinggian tempat sampah melebihi maka SIM900A dan modul GPS akan mengirimkan sms berupa status dan lokasi tempat sampah tersebut berada. Selain itu terdapat sensor MQ-135 dan PH untuk mendeteksi cairan dan gas berbahaya. Nilai dari kedua sensor tersebut akan dikirimkan ke server agar dapat ditampilkan di web server beserta dengan status tempat sampah tersebut.
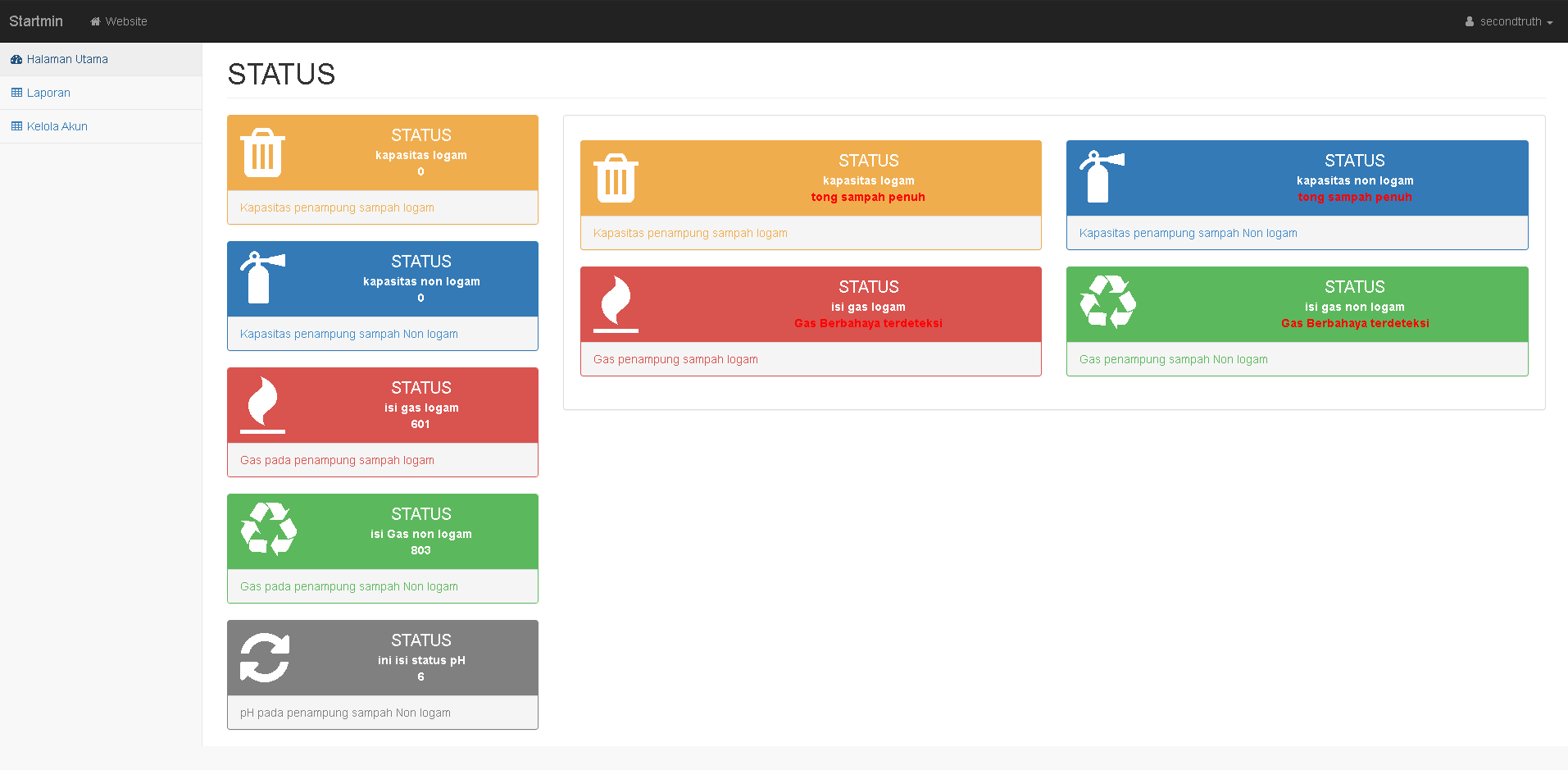
Gambar 1.2 Koneksi data ke server
Pada gambar diatas adalah Nilai yang didapat dari hasil pengujian yang merupakan output dari sensor-sensor yang terpasang pada tempat sampah pintar. Nilai-nilai yang didapat pada tabel diatas selanjutnya akan dikirimkan ke server oleh modul Wemos D1 mini dan ditampilkan kedalam web